僧衫吹,月如雪,花下已千年。
# 概述
单变元方程求近似解是数值分析最基本、最重要的问题之一,最基本的方法是二分法、不动点迭代法和牛顿法。
# 二分法
# 算法实现和注意事项
二分法 (Bisection Method) 是基于介值定理的基本方法,采用二分区间方式对解的范围减半收缩,代码如下:
//input: function f(x); endpoints: a, b; tolerance TOL; maximum number of iterations N | |
//output: approximate solution p or message of failure | |
double FA = f(a); | |
for (int i = 1; i <= N; i++){ | |
double p = a + (b-a)/2; | |
double FP = f(p); | |
if (FP == 0 || (b-a)/2 < TOL) return p; | |
if (sgn(FA) == sgn(FP)) a = p; | |
else b = p; | |
} | |
return p; |
其中, sgn(x) = (x>0) ? 1 : ((x<0) ? -1 : 0) 是符号函数。
# 算法中的误差控制
在二分法的代码中,存在一些算法上的误差控制。
首先,在迭代过程中,求 中点需要采用 而非 .
此外还要注意,代码中的 sgn(FA)==sgn(FP) 尽量不采用 FA*FP>0 代替,因 FA*FP 可能造成乘法上溢 (但可以采用 sgn(FA)*sgn(FP)<0 代替)。
# 停机控制条件
此外,算法中的停机还可以采用下面的控制条件:
停机的控制条件是根据实际情况确定的。其中,条件 3 尽量不要使用,因为可能出现 的绝对值小,但 与零点较远的情况。
# 收敛速度分析
根据二分法的定义,可以证明二分法是线性收敛的。但严谨的证明也不十分容易。
# 不动点迭代
# 基本概念和问题转化
在介绍不动点迭代的方法前,我们先给出不动点的定义:
对于函数 , 若 使得 , 则称 是 的不动点 (fixed point).
于是,不动点迭代法 (fixed point iteration) 就是在不动点收敛的前提下,根据反复迭代产生一个收敛序列 , 使得
从而 , 即求得不动点。
如果需要求解的方程不是 的形式,而是 的形式,那么可以构造 , 则求 的根就转化成求 的不动点的问题。
于是,解决该算法的最大问题就是不动点的存在性与收敛性的判断。
# 不动点的存在性和收敛性
# 不动点的存在性
不动点的存在性是易于描绘的。
设 在 内有定义,且在 内可导,则若 . 则 在 内存在不动点。
该定理根据介值定理易证,实际上,该定理是压缩映射定理在一维空间上的的特殊形式。同时注意到, 的条件不是十分苛刻的,甚至是不动点存在所必须的。
# 不动点的收敛性
如果在区间 上存在两个或以上的不动点,那么极有可能存在不收敛到欲求的不动点的情况。于是,如果在某些条件下,可以限制在区间 内存在唯一的不动点,那么不动点在经过迭代后有更大的概率会收敛。实际上,根据压缩映射定理即可解决这一问题。
# Banach 不动点定理
令 是一个完备的度量空间,若存在映射 及 使得
则存在唯一的不动点 使得 , 于是 , 有
即任取一点进行迭代都是收敛的。该定理称为 Banach 不动点定理 (Banach fixed point theorem), 又称压缩映射定理 (contraction mapping theorem). 其中的映射 称为压缩映射 (contraction mapping).
证明是容易的。
唯一不动点可以采用反证法证明。若 都为不动点,则, 矛盾。
迭代收敛根据压缩映射的性质即可证明。, , 于是, 有, 即证。
# 不动点迭代的求解
不动点迭代的算法十分简单,仅包含一个迭代。算法代码如下:
//input: equation f(x)=x, initial approximation x0, tolerance TOL, maximum number of iterations N | |
//output: approximate solution x or message of failure | |
for (int i=1; i<=N; i++){ | |
double x = f(x0); | |
if (-TOL < x-x0 && x-x0 < TOL) return x; | |
x0 = x; | |
} |
# 收敛速度分析
不动点迭代法的收敛速度, 于是在李普希茨常数 估计恰当的情况下,不动点迭代是线性收敛的,且渐近误差常数为李普希茨常数.
# 牛顿法
# 基本想法
牛顿法 (Newton method) 同样是基于迭代的算法。其想法基于泰勒展开或几何估计。
若, 则对 在 处泰勒展开,得到
近似地,有
于是可以对 作估计:
这就是牛顿法的基本想法。
# 算法
牛顿法在算法中不断迭代 以取得更高的精度。其算法如下:
//input: function f(x), initial approximation p0, tolerance TOL, maximum number of iterations N | |
//output: approximate solution p or message of failure | |
for (int i=1; i<=N; i++) { | |
double p = p0 - f(p0)/df(p0); //df(x) means the derivative function of f | |
if (-TOL <= p-p0 && p-p0 <= TOL) return p; | |
p0 = p; | |
} |
像二分法一样,我们也可以选择不同的停机方式。
# 牛顿法的收敛性
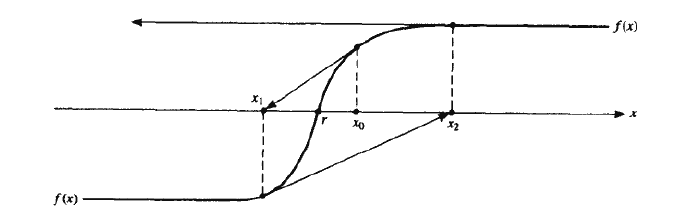
牛顿法并不是时刻收敛的,事实上,只有选取的初值 充分接近, 才能保证迭代产生的序列 收敛。下图是一个牛顿法不收敛的例子。
# 牛顿法的改进
# 正割法
在牛顿法中,为解决求导困难的问题,采用
估计,
该方法的收敛速度慢于牛顿法,但因为简化了导数的计算,最终的计算速度一般快于牛顿法 (与具体函数有关)。
其算法如下:
//input: function f(x), initial approximations p0, p1, tolerance TOL, maximum number of iterations N | |
//output: approximate solution p or message of failure | |
double q0 = f(p0); | |
double q1 = f(p1); | |
for (int i=2; i<=N; i++) { | |
double p = p1 - q1*(p1 - p0)/(q1 - q0); | |
if (-TOL <= p-p1 && p-p1 <= TOL) return p; | |
p0 = p1; | |
q0 = q1; | |
p1 = p; | |
q1 = f(p); | |
} |